
Agriculture
December 21, 2023
Afridev Hand Pump
Read SolutionImplemented by
SK Industries

Updated on January 31, 2024
·Created on October 3, 2020
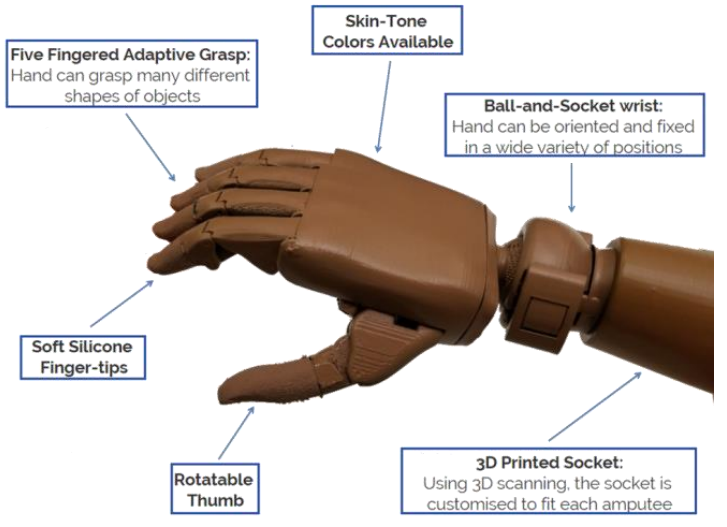
The Victoria Hand is a body-powered prosthesis consisting of a hand for amputee.
The Victoria Hand is a body-powered prosthesis consisting of a hand, a wrist, a limb-socket, and a harness. It has a natural appearance and is custom-made to fit each amputee. The hand allows the amputee to perform a range of activities needed. The Victoria Hand closes when activated into an adaptive grasp, allowing users to have a dynamic range of grip strength.
Target SDGs
SDG 3: Good Health and Well-Being
Market Suggested Retail Price
$240.00
Target Users (Target Impact Group)
Public Sector Agencies, NGOs
Distributors / Implementing Organizations
The Victoria Hand is distributed by these organizations: Range of Motion Project (Guatemala and Ecuador), Nepal Orthopaedic Hospital (Nepal), Agile (Cambodia), Enable International Haiti (Haiti), CoRSU (Uganda), St. Luke's Hospital (Kenya)
Competitive Landscape
Direct competitors include e-NABLE 3D-printed prosthetic devices and CURE Prosthetics.
Regions
Central Africa, Central Asia, Latin America
Countries
Cambodia, Ecuador, Egypt, Guatemala, Haiti, Kenya, Nepal, Uganda
Manufacturing/Building Method
Victoria Hands are manufactured at their clinics at Guatemala, Ecuador, Nepal, Cambodia, Haiti, Egypt, Uganda, and Kenya.
Intellectural Property Type
Trademark
User Provision Model
Users may purchase the Victoria Hand through one of the many distribution partners, through Range of Motion Project (Guatemala and Ecuador), Nepal Orthopaedic Hospital (Nepal), Agile (Cambodia), Enable International Haiti (Haiti), CoRSU (Uganda), St. Luke's Hospital (Kenya).
Distributions to Date Status
Over 120 Victoria Hand have been distributed as of 2019.
Craftsmanship required
3D printing
Patient satisfaction
Unknown
Patient compliance
Unknown
Comfort
Unknown
Materials
ABS Plastic (3D print material), silicone, steel (bolt & nut)
Water resistant (yes/no)
Yes
Amputation level
Trans-humeral and Trans-Radial
Weight (kg)
Unknown
Design Specifications
3D scanning is used to capture the unique shape of the individual’s limb, to thereby 3D print a customized socket for that user.
Full system solution includes: Hand, Wrist, Socket & Hardness
Silicone is used for fingertips to prevent slipping.
Rotatable Thumb: The thumb can be rotated by the user allowing it to hold various positions. This includes a one-finger pinch, a two-finger pinch, a power grasp, or a lateral grasp.
Backlock Mechanism: The voluntary close (VC) model contains the back-lock mechanism and allows the user to lock the hand closed, for tasks such as carrying bags, or constant grip onto objects.
Rotatable Wrist: The wrist contains a ball-and-socket mechanism that allows the user to quickly and easily change the orientation of the hand. This wrist can rotate the hand up to 360 degrees, while simultaneously being flexed or extended by 25 degrees.
Adaptive Grasp: The adaptive gripping mechanism makes it easier for your fingers to catch the shape of an oddly shaped object.
There are three different arm prosthesis currently available from the Victoria Hand Project:?
Trans-radial (mid-forearm)
Trans-radial suspension (short-forearm)
Trans-humeral (mid-humerus)
Product Schematics
Technical Support
Provided by manufacturer
Replacement Components
None
Lifecycle
5 -10 years
Manufacturer Specified Performance Parameters
Designer specified performance targets include : low-cost, improve user's quality of life especially amputees in developing countries.
Vetted Performance Status
Unknown
Safety
Unknown
Complementary Technical Systems
None
Academic Research and References
Marino, M., Pattni, S., Greenberg, M., Miller, A., Hocker, E., Ritter, S., & Mehta, K., 2015, Access to prosthetic devices in developing countries: Pathways and challenges. In 2015 IEEE global humanitarian technology conference (GHTC), pp. 45-51.
Dechev, N., Cleghorn, W. L., & Naumann, S., 2001, Multiple finger, passive adaptive grasp prosthetic hand. Mechanism and machine theory, 36(10), pp. 1157-1173.
Massa, B., Roccella, S., Carrozza, M. C., & Dario, P., 2002, Design and development of an underactuated prosthetic hand. In Proceedings 2002 IEEE international conference on robotics and automation (Cat. No. 02CH37292), Vol. 4, pp. 3374-3379.
Dalley, S. A., Wiste, T. E., Withrow, T. J., & Goldfarb, M., 2009, Design of a multifunctional anthropomorphic prosthetic hand with extrinsic actuation. IEEE/ASME transactions on mechatronics, 14(6), pp. 699-706.
Millstein, S. G., Heger, H., & Hunter, G. A., 1986, Prosthetic use in adult upper limb amputees: a comparison of the body-powered and electrically powered prostheses. Prosthetics and orthotics international, 10(1),pp. 27-34.
Compliance with regulations
Unknown
Evaluation methods
Unknown
Other Information
None
Agriculture
December 21, 2023
Implemented by
SK Industries

Agriculture
December 27, 2023
Implemented by
SOVEMA

Agriculture
January 10, 2024
Implemented by
Tye WORKS
Agriculture
June 23, 2024
Implemented by
LoooP Creative Ltd

Agriculture
January 10, 2024
Implemented by
NRSRelief

Agriculture
December 31, 2023
Implemented by
Potential Energy

Agriculture
June 22, 2024
Implemented by
World Bicycle Relief
Agriculture
June 8, 2024
Implemented by
ClickMedix
Agriculture
February 14, 2024
Implemented by
USTAR Biotechnologies (Hangzhou) LTD

Agriculture
January 8, 2024
Implemented by
Gadgil Lab, University of California Berkeley
Have thoughts on how we can improve?
Give Us Feedback